

WPI Touch Tomorrow
2018 | Ping Pong Ball Shooter
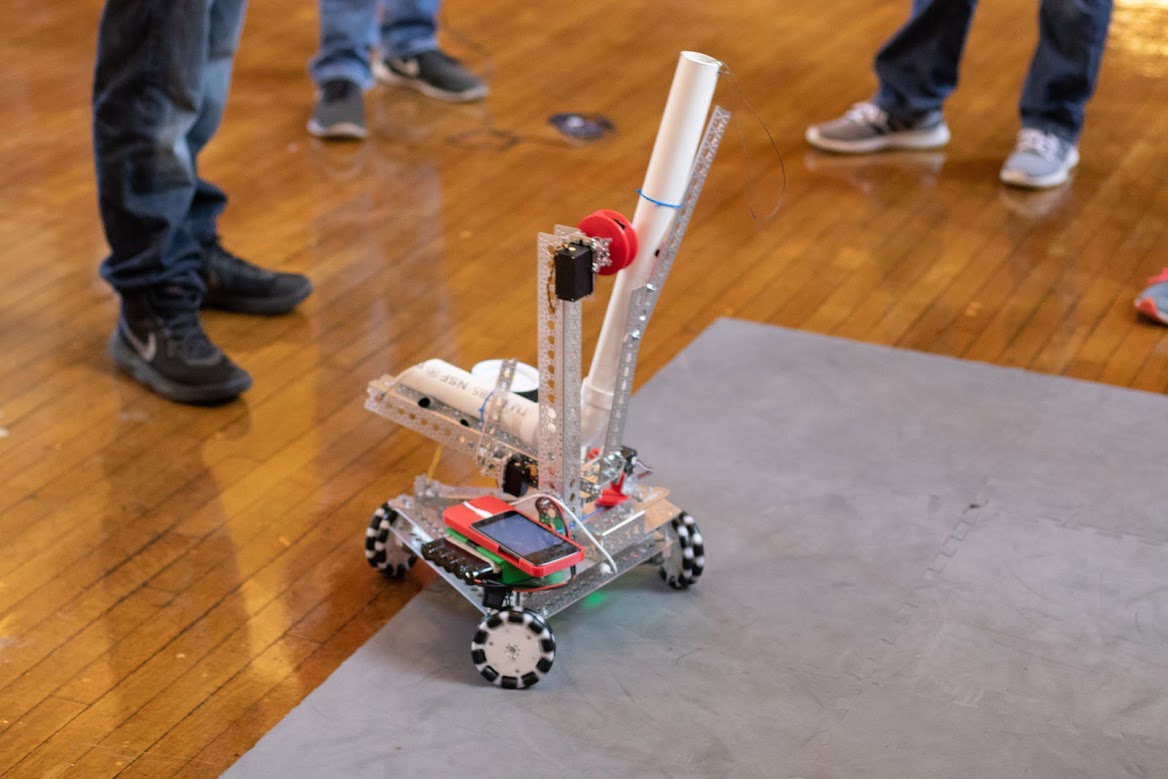
We wanted to make a robot that can shoot ping pong balls and is very maneuverable (e.g it can spin in place, arc around corners, handles well when turning, etc.), but still simple enough to be controlled by passerby that have no knowledge of robotics. There is a greater emphasis on maneuverability because the previous demonstration robot the team built did not handle well, could not spin in place, and took a long time to turn around, so the overall experience of driving a robot was diminished for the passerby who controlled it.
We created a ping-pong shooting bot that could be maneuvered and be used to shoot ping pong balls. We setup a basket and created a challenge for kids to use the robot and fire the ping pong balls into it. This worked great as it gave the kids a chance to control a robot on a smaller scale than our competition robot but still give them the same sensation. The Robot uses 3 omni wheels which allowed it to move any possible direction. The PVC piping created the holder for the ping pong balls which were accelerated out using a flywheel. The entire PVC pipe and Flywheel were on a movable pivot which could be controlled through the remote control.
2019 | Soccer Bots
 We brought a small section of the playing field along with a few plastic blocks to demonstrate the key features of CraterBot (our robot from last season). While some team members demonstrated CraterBot, the other members set up a larger field with mini soccer balls and blocks for our Soccer Bots. The Soccer Bots are two small robots the team built as an activity for the young kids at the event to play with. Using two Logitech game controllers, the kids could drive the Soccer Bots around a field and with the press of a button on the game controller, the robot would shoot the ball with the attached arm on the front of the robot.
We brought a small section of the playing field along with a few plastic blocks to demonstrate the key features of CraterBot (our robot from last season). While some team members demonstrated CraterBot, the other members set up a larger field with mini soccer balls and blocks for our Soccer Bots. The Soccer Bots are two small robots the team built as an activity for the young kids at the event to play with. Using two Logitech game controllers, the kids could drive the Soccer Bots around a field and with the press of a button on the game controller, the robot would shoot the ball with the attached arm on the front of the robot.
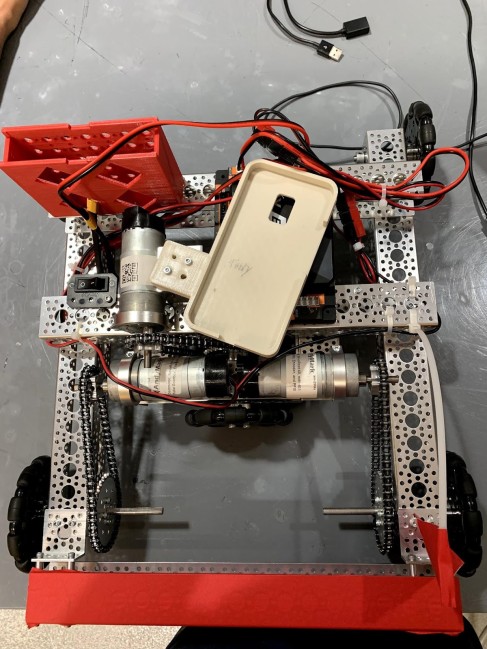 The Soccer Bots were constructed using a very basic chassis made out of 4 U-Channels arranged in a pattern that ensures strength and stability for the twisting of the U-Channels. We used Andymark 40:1 gearboxes and geared them down 2:1 using chains, to ensure that the robots were slow enough for the kids so they wouldn’t get hurt. We used omni wheels on the chassis, to ensure that the robots could slide horizontally. We used 3D printed phone cases and a 3D printed battery case for the robot. We also did wire management on the robot by bundling up all of the wires connecting to the Rev Expansion Hub, including motors and batteries.
The Soccer Bots were constructed using a very basic chassis made out of 4 U-Channels arranged in a pattern that ensures strength and stability for the twisting of the U-Channels. We used Andymark 40:1 gearboxes and geared them down 2:1 using chains, to ensure that the robots were slow enough for the kids so they wouldn’t get hurt. We used omni wheels on the chassis, to ensure that the robots could slide horizontally. We used 3D printed phone cases and a 3D printed battery case for the robot. We also did wire management on the robot by bundling up all of the wires connecting to the Rev Expansion Hub, including motors and batteries.